
후 드디어 OS개발에 손댈 수 있는 시간이 났다.
그동안 이곳 저곳 다니고 일정이 계속 겹쳐서 시간이 나질 않았다.
사실 노트북 들고다니면서 중간 중간 만지긴 했는데 큰 변화는 아니라서 글 쓰진 않았다.
본문이 시작되기 전에 변경된건
Types.h 에 정의되어있는 BOOL 타입을 unsigned char 을 c99 이후 정의된 _Bool 타입으로 변경했다.
그 이유는 말하자면 조금 복잡한데.
여러이유가 있겠지만 unsigned char 에 대한 ! 연산을 이유로 들겠다.
보통 Not 연산을 진행할때 n xor 1 로 처리하개 되면 빠르게 연산 할 수 있다.
그런데 얼마전에 unsigned char (이전의 BOOL) 에 대한! 연산자랑 n xor 1 의 차이를 보았다.
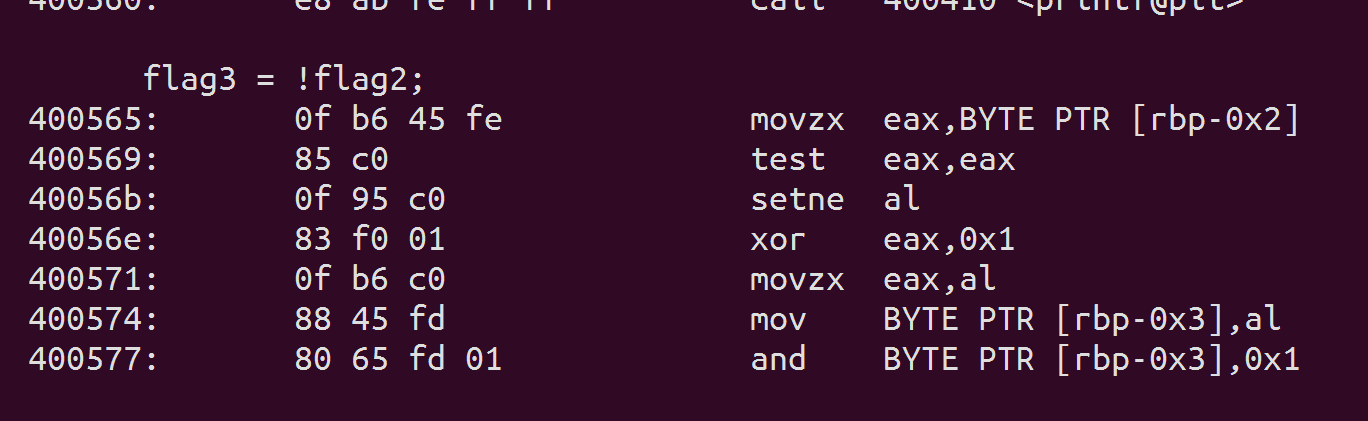

두 코드를 살펴보면 확실하게 차이가 난다.
물론 컴파일러 최적화 옵션인 -O3 같은 옵션을 붙이면 아마 xor로 변하겠지만, 아무래도 최적화 옵션을 적용했을때 의도하지 않은 동작을 할 가능성이 높다.
일단 최적화 옵션을 붙이지 않는 가정 하에 not 연산은 딱봐도 연산이 많다.
cmp 후 setne를 통해 데이터를 설정하게 되는데, 이는 시스템에서 t/f 를 구분할때 쓰는 비트 외에도 사용 될 수 있음을 가정한 것이라고 정리할 수 있다.
이건 _Bool 타입으로 변경하면서 해결(컴파일 하면 두 코드가 동일하게 컴파일 된다. 기억상으론 xor을 썻던 것 같다.)
이제 드디어 본문이다.
이번에는 전반적으로 타이머, 시간과 관련된 부분을 개발했다.
좀더 구체적으로
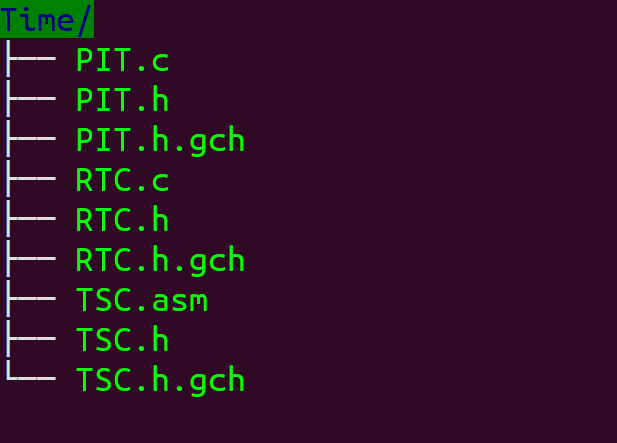
PIT(Programmable Interval Timer) Driver 의 개발과 Timestamp 그리고 RTC(Real Time Clock) Driver 의 개발이다.
이번에 개발한 드라이버 묶음의 소스 트리이다.
일단 PIT에 접근하는 건
PortIO Driver를 통해 0x43, 0x40, 0x41, 0x42 로 접근 가능하다.
뭐 PortMapIO 가 그렇듯 여러 비트를 열씸히 설정해 주어야 한다. 그중 가장 많으 쓰일것 같은 0x43 컨트롤 필드는
7,6 - SC : Select Counter 커멘드의 대상이 되는 카운터
5,4 - RW : Read/Write 읽기 쓰기 여부
00: 카운터의 현제 값을 읽음 (2byte)
01: 카운터의 하위 바이트를 R/W (1Byte)
10: 카운터의 상위 바이트를 R/W (1Byte)
11: 카운터의 하위 바이트에서 상위 바이트 순으로 R/W (2Byte)
3,2,1-Mode: PIT 컨트롤러의 카운트 모드 설정
000: 모드 0 (Interrupt during counting)
001: 모드 1 (Programmable monoflop)
010: 모드 2 (Clock rate generator)
011: 모드 3 (Square wave generator)
100: 모드 4 (Software-triggered impulse)
101: 모드 5 (Hardware-triggered impulse)
0 - BCD : 카운터의 값을 바이너리 도는 BCD 포멧으로 설정한다.
BCD 포멧은 0~9999 까지
바이너리 타입은 0x00~0xFFFF 까지
각 필드에 대한 자세한 설명은 생략하겠다.
아무튼 SC 필드에 의해 카운터가 선택이 되고 아래는 그 옵션이라고 보면 된다.
아래는 PIT관련된 상수 정의와 함수의 정의가 담겨있는 Driver/Time/PIT.h 이다.
#ifndef __PIT_H__
#define __PIT_H__
#include <Types.h>
//PIT의 동작 속도 1.193182MHz
#define PIT_FREQUENCY 1193182
#define MS_TO_COUNT(x) (PIT_FREQUENCY * (x)/1000)
#define US_TO_COUNT(x) (PIT_FREQUENCY * (x)/1000000)
#define PIT_PORT_CONTROL 0x43
#define PIT_PORT_COUNTER0 0x40
#define PIT_PORT_COUNTER1 0x41
#define PIT_PORT_COUNTER2 0x42
#define PIT_CONTROL_SC_COUNTER0 0x00
#define PIT_CONTROL_SC_COUNTER1 0x40
#define PIT_CONTROL_SC_COUNTER2 0x80
#define PIT_CONTROL_RW_BIT11 0x30
#define PIT_CONTROL_RW_BIT00 0x00
#define PIT_CONTROL_MODE_0 0x00
#define PIT_CONTROL_MODE_2 0x04
#define PIT_CONTROL_BCD_FALSE 0x00
#define PIT_CONTROL_BCD_TRUE 0x01
#define PIT_COUNTER0_FLAG_ONCE (PIT_CONTROL_SC_COUNTER0 | PIT_CONTROL_RW_BIT11 | PIT_CONTROL_MODE_0 | PIT_CONTROL_BCD_FALSE)
#define PIT_COUNTER0_FLAG_INTERVAL (PIT_CONTROL_SC_COUNTER0 | PIT_CONTROL_RW_BIT11 | PIT_CONTROL_MODE_2 | PIT_CONTROL_BCD_FALSE)
#define PIT_COUNTER0_FLAG_LATCH (PIT_CONTROL_SC_COUNTER0 | PIT_CONTROL_RW_BIT00 )
// SET PIT Counter 0 = _Count and Cange state Interval
void InitializePIT(WORD _Count, BOOL _IsInterval);
WORD ReadTimerCount0();
/*
Should be disable Interrupt
Parameter _Count : < 50ms
*/
void WaitUsingPITCounter0(WORD _Count);
#endif /*__PIT_H__*/
PIT 장치의 동작 클록은 1.19318 Mhz로 동작하며 매회 카운터의 값을 1씩 감소시켜 0이 될때 신호를 발생시킨다.
클록을 기준으로 동작하는 PIC를 우리가 통상 사용하는 ‘시간’으로 사용하기 위해서 t = 1193182 * rate ( ex: 1ms rate = 0.001 ) 식을 쓴다.
0SOS는 카운터 0를 사용할 것이며 이전부터 카운터 1과 2는 메인 메모리와 PC 스피커를 위해 쓰인다고 한다.
뭐 위 함수 구현하는건 어쩌피 열씸히 PortMapIO를 통해 데이터를 읽고 쓰고 하는 것 뿐이라 복잡하지 않다.
#include "PIT.h"
#include <Driver/IO/PortIO.h>
void InitializePIT(WORD _Count, BOOL _IsInterval)
{
//만약 주기적으로 실행되어야 한다면 모드 2 아니면 모드 0
if(_IsInterval == TRUE)
PortIO_OutByte(PIT_PORT_CONTROL, PIT_COUNTER0_FLAG_INTERVAL);
else
PortIO_OutByte(PIT_PORT_CONTROL, PIT_COUNTER0_FLAG_ONCE);
//카운터의 하위 비트와 상위 비트를 설정
PortIO_OutByte(PIT_PORT_COUNTER0, _Count);
PortIO_OutByte(PIT_PORT_COUNTER0, _Count >> 8);
}
WORD ReadTimerCount0()
{
BYTE high, low;
WORD ret = 0x0000;
//Counter 0 의 데이터를 읽어온다.
PortIO_OutByte(PIT_PORT_CONTROL, PIT_COUNTER0_FLAG_LATCH);
low = PortIO_InByte(PIT_PORT_COUNTER0);
high = PortIO_InByte(PIT_PORT_COUNTER0);
//상위 비트 하위 비트 묶어서 2바이트로 변환
ret = high;
ret = (ret << 8) | low;
return ret;
}
void WaitUsingPITCounter0(WORD _Count)
{
//0~0xFFFF 까지 반복
WORD CurrentCounter = 0;
InitializePIT(0, TRUE);
const WORD LastCounter0 = ReadTimerCount0();
while(TRUE)
{
//Get Counter 0 Value
CurrentCounter = ReadTimerCount0();
//시간이 흐름에 따라 값이 커짐
if(((LastCounter0 - CurrentCounter) & 0xFFFF) >= _Count)
break;
}
}
보면 크게 복잡한 건 없다.
PIT 타이머를 초기화 하는 함수와 Counter 0 의 값을 읽어오는 함수, 그리고 그럴 이용해 ms 단위 대기 함수가 끝.
그럼 다음은 타임 스탬프다.
타임 스탬프는 클록 과 버스 속도 비율에 따라 올라간다고 한다. 따라서 정확하게 올라가는데, 이를 통해 정확한 속도 측정이 가능하다.
코드는 정말로 간단한데,
;Driver/Time/TSC.asm
[BITS 64]
SECTION .text
global ReadTSC
;타임 스탬프 카운터를 읽어서 반환
ReadTSC:
push rdx
rdtsc ;타임 스탬프 카운터의 값을 rdx:rax에 저장
shl rdx, 32 ; rdx 레지스터의 상위 32비트 tsc 값과 rax레지스터의
or rax, rdx ; 하위 32비트 tsc값을 rax에 저장
pop rdx
ret
RDTSC 명령어를 이용해 불러오게 된다.
그 다음으론 RTC 드라이버인데,
RTC 컨트롤러는 시간 저장을 담당하는 컨트롤러다. 또한 PC가 꺼진 이후에도 기록하기 위해 전원을 쓴다.
맞다 그 메인보드의 수은전지 와 같은것 말이다.
CMOS 메모리 안에 RTC 데이터가 가 기록되어 있다. CMOS 에 접근해서 RTC 데이터를 가져와야 한다.
CMOS 메모리는 는 ProtIO Driver로 접근 가능하며 메모리 어드레스 포트 0x70 과 메모리 데이터 포트 0x71로 접근이 가능하다.
RTC 관련된 주소 필드 표다.
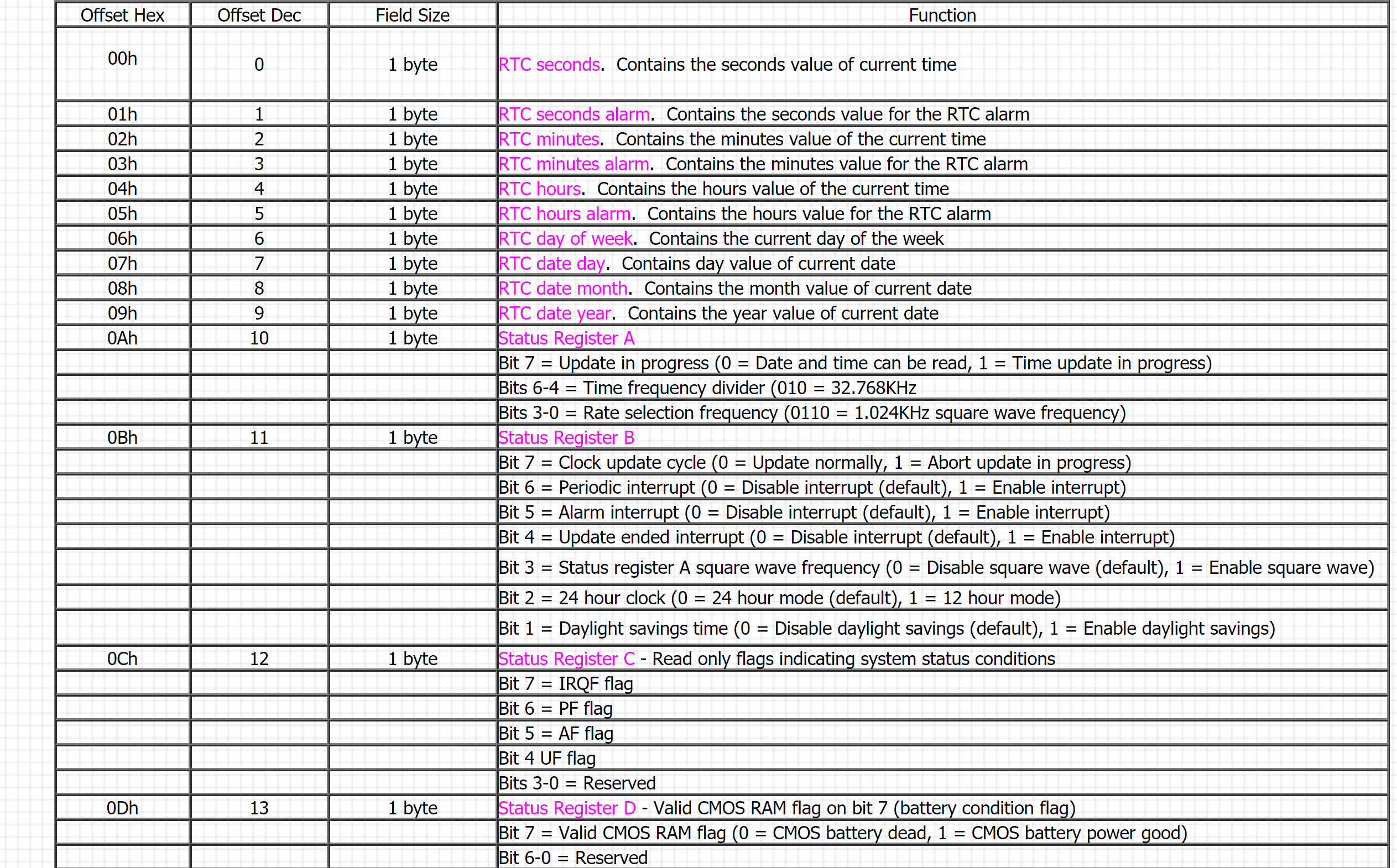
위 표를 참고해서 만들면 된다.
//Driver/Time/RTC.h
#ifndef __RTC_H__
#define __RTC_H__
#include <Types.h>
#define PORT_CMOS_ADDRESS 0x70
#define PORT_CMOS_DATA 0x71
#define CMOS_ADDRESS_RTC_SECOND 0x00
#define CMOS_ADDRESS_RTC_MINUTE 0x02
#define CMOS_ADDRESS_RTC_HOUR 0x04
#define CMOS_ADDRESS_RTC_DAY_OF_WEEK 0x06
#define CMOS_ADDRESS_RTC_DAY_OF_MONTH 0x07
#define CMOS_ADDRESS_RTC_MONTH 0x08
#define CMOS_ADDRESS_RTC_YEAR 0x09
//BCD 코드 변환 - BCD 코드: 1바이트를 4비트씩 잘라서 10진수 2자리로 표현 ex) 0010 0001 이면 21
#define BCD_TO_BIN(x) ((((x) >> 4) * 10) + ((x) & 0x0F ))
void ReadRTCTime(BYTE* _Out_Hour, BYTE* _Out_Minute, BYTE* _Out_Second);
void ReadRTCDate(WORD* _Out_Year, BYTE* _Out_Month, BYTE* _Out_DayOfMonth, BYTE* _Out_DayOfWeek);
char* ConvertDayOfWeekString(BYTE _DayOfWeek);
#endif /*__RTC_H__*/
주소 필드를 정의하는 것과 데이터를 가져오는것, 요일을 문자열로 변경하는역할을 한다.
그리고 CMOS에서 가져온 RTC 데이터는 BCD 코드여서 바이너리로 변경하는 코드가 필요하다.
뭐 이것도 portIO로 열씸히 가져오는거라 딱히 뭐 말할건 없다.
//Driver/Time/RTC.c
#include "RTC.h"
void ReadRTCTime(BYTE* _Out_Hour, BYTE* _Out_Minute, BYTE* _Out_Second)
{
BYTE data;
//CMOS 메모리에서 시간에 관련된 정보를 읽어오는 함수 값은 BCD 코드
PortIO_OutByte(PORT_CMOS_ADDRESS, CMOS_ADDRESS_RTC_HOUR);
data = PortIO_InByte(PORT_CMOS_DATA);
*_Out_Hour = BCD_TO_BIN(data);
PortIO_OutByte(PORT_CMOS_ADDRESS, CMOS_ADDRESS_RTC_MINUTE);
data = PortIO_InByte(PORT_CMOS_DATA);
*_Out_Minute = BCD_TO_BIN(data);
PortIO_OutByte(PORT_CMOS_ADDRESS, CMOS_ADDRESS_RTC_SECOND);
data = PortIO_InByte(PORT_CMOS_DATA);
*_Out_Second = BCD_TO_BIN(data);
}
void ReadRTCDate(WORD* _Out_Year, BYTE* _Out_Month, BYTE* _Out_DayOfMonth, BYTE* _Out_DayOfWeek)
{
BYTE data;
//CMOS 메모리에서 날자와 관련된 정보를 읽어오는 함수 값은 BCD 코드
PortIO_OutByte(PORT_CMOS_ADDRESS, CMOS_ADDRESS_RTC_YEAR);
data = PortIO_InByte(PORT_CMOS_DATA);
*_Out_Year = BCD_TO_BIN(data) + 2000; //연도에 2000을 더해 2000년도를 표현
PortIO_OutByte(PORT_CMOS_ADDRESS, CMOS_ADDRESS_RTC_MONTH);
data = PortIO_InByte(PORT_CMOS_DATA);
*_Out_Month = BCD_TO_BIN(data);
PortIO_OutByte(PORT_CMOS_ADDRESS, CMOS_ADDRESS_RTC_DAY_OF_MONTH);
data = PortIO_InByte(PORT_CMOS_DATA);
*_Out_DayOfMonth = BCD_TO_BIN(data);
PortIO_OutByte(PORT_CMOS_ADDRESS, CMOS_ADDRESS_RTC_DAY_OF_WEEK);
data = PortIO_InByte(PORT_CMOS_DATA);
*_Out_DayOfWeek = BCD_TO_BIN(data);
}
char* ConvertDayOfWeekString(BYTE _DayOfWeek)
{
//날자를 요일 문자열로 바꿔주는 함수
static char* WeekStringTable [8] = {"NULL", "Sunday", "Monday", "Tushday", "Wednesday", "Thursday", "Friday", "Saturday"};
if(_DayOfWeek >= 8)
return WeekStringTable[0];
return WeekStringTable[_DayOfWeek];
이로서 드라이버가 완성이 되었다!!
이제 이 드라이버를 열씸히 활용하는 셸 커멘드를 만들었다.
void Command_SetTimer(const char* _Parameter)
{
char ParameterBuffer[200];
PARAMETERLIST pList;
InitializeParameter(&pList, _Parameter);
if(GetNextParameter(&pList,ParameterBuffer) == 0)
{
_Printf("settimer {time(ms)} {interval}\n");
return;
}
long value;
if(_atoi(ParameterBuffer, &value, 10) == FALSE)
{
_Printf("Parameter Decimal number\n");
return;
}
if(GetNextParameter(&pList,ParameterBuffer) == 0)
{
_Printf("settimer {time(ms)} {interval}\n");
return;
}
long interval_value;
if(_atoi(ParameterBuffer, &interval_value, 10) == FALSE)
{
_Printf("Parameter is not Decimal number\n");
return;
}
InitializePIT(MS_TO_COUNT(value), interval_value != 0);
_Printf("Time = %d ms. Interval = %s Change Complate\n",value, (interval_value == 0)? "False": "True");
}
void Command_PITWait(const char* _Parameter)
{
char ParameterBuffer[200];
PARAMETERLIST pList;
InitializeParameter(&pList, _Parameter);
if(GetNextParameter(&pList,ParameterBuffer)==0)
{
_Printf("wait {time(ms)}\n");
return;
}
long value;
if(_atoi(ParameterBuffer, &value, 10) == FALSE)
{
_Printf("Parameter is not Decimal number\n");
return;
}
_Printf("%d ms Sleep Start...\n", value);
DisableInterrupt();
for(long i =0; i < value/30L; i++)
{
WaitUsingPITCounter0(MS_TO_COUNT(30));
}
WaitUsingPITCounter0(MS_TO_COUNT(value % 30));
EnableInterrupt();
_Printf("%d ms Sleep Complate.\n", value);
InitializePIT(MS_TO_COUNT(1), TRUE);
}
void Command_ReadTimeStamp(const char* _Parameter)
{
QWORD tsc = ReadTSC();
_Printf("Time Stamp Counter = %q \n",tsc);
}
void Command_CPUSpeed(const char* _Parameter)
{
QWORD last_tsc;
QWORD total_tsc = 0;
_Printf("Now Calculate.");
DisableInterrupt();
for(int i = 0; i < 200; i++)
{
last_tsc = ReadTSC();
WaitUsingPITCounter0(MS_TO_COUNT(50));
total_tsc+= ReadTSC() - last_tsc;
_Printf(".");
}
InitializePIT(MS_TO_COUNT(1),TRUE);
EnableInterrupt();
_Printf("\n Cpu Clock = %d MHz \n", total_tsc/10/1000/1000);
}
void Command_ShowDateTime(const char* _Parameter)
{
BYTE Second, Minute, Hour;
BYTE DayOfWeek, DayOfMonth, Month;
WORD Year;
ReadRTCTime(&Hour, &Minute, &Second);
ReadRTCDate(&Year,&Month,&DayOfMonth, &DayOfWeek);
_Printf("Date: %d-%d-%d %s, ", Year, Month, DayOfMonth, ConvertDayOfWeekString(DayOfWeek));
_Printf("Time: %d:%d:%d\n", Hour, Minute, Second);
}
복잡시럽게 보이지만 자세히 보면 양만 많지 단순히 값을 받아와서 출력하는것에 불과하다.
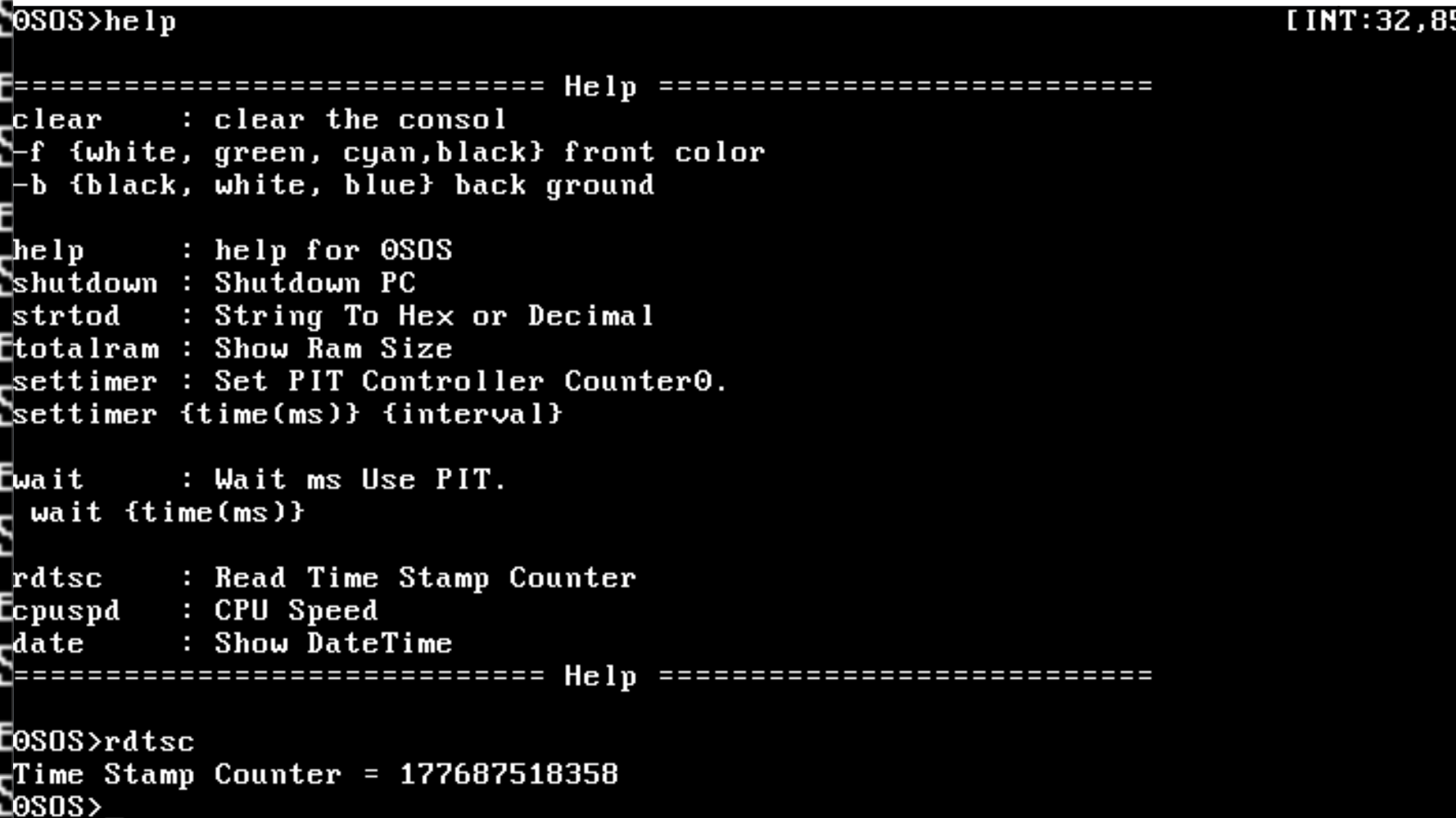
커멘드는 이렇게 추가 되었으며 rdtsc 명령어가 멀쩡히 동작한다.
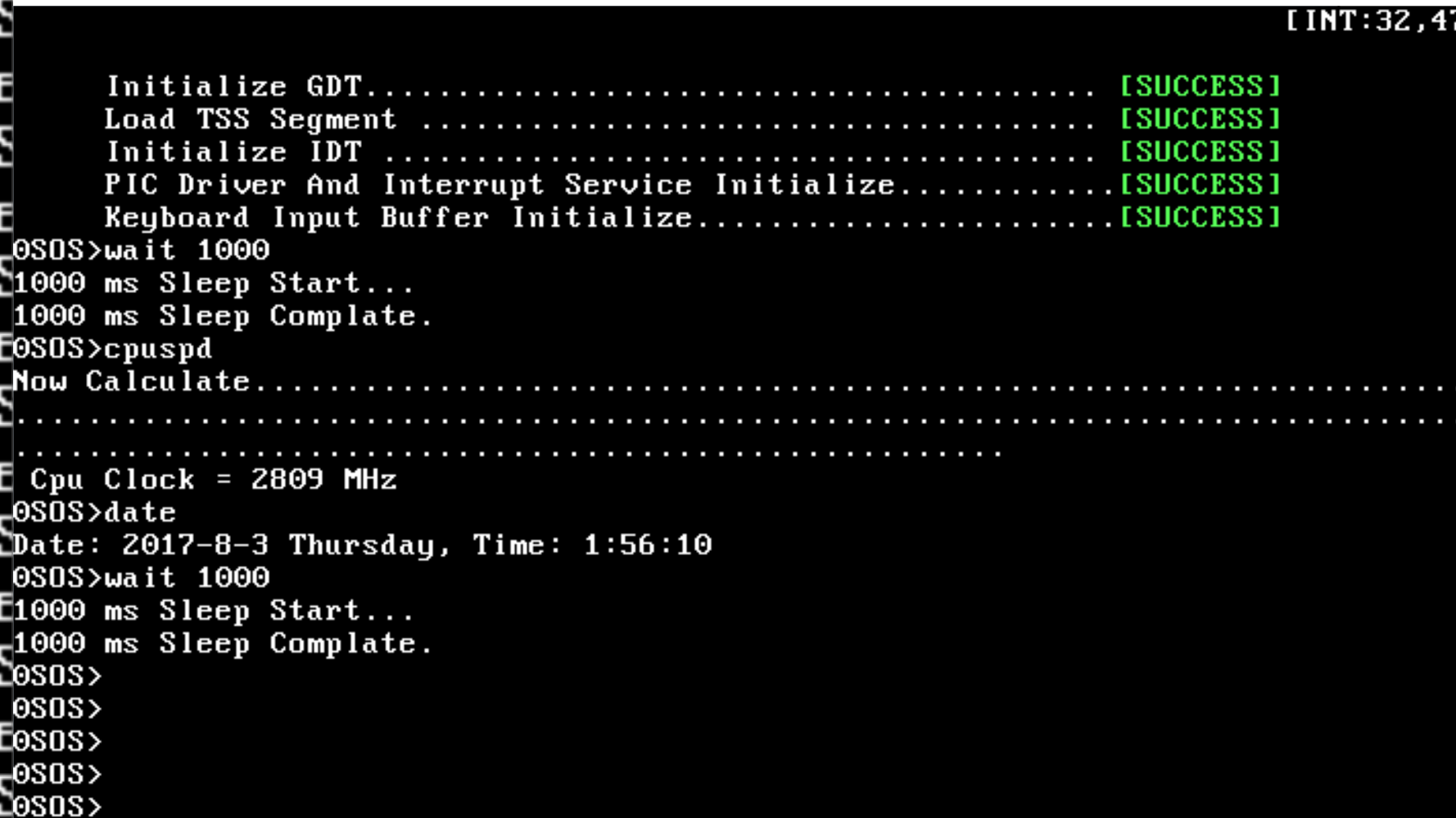
다른 명령어에 대한 결과이다.
date를 멋지게 받아오기도 하고
cpu clock 측정도 하고
특정 ms 동안 대기하기도 한다.
settimer 명령어도 멀쩡히 동작하나, 이미지로 보여주기엔 한계가 있어서 뺏다.
개발하면서 두가지의 버그를 수정했는데, 하나는 _Printf 함수에 대한 unsigned 값의 의도하지 않은 동작이다.
이는 %q 출력 문자와 _u_itoa 함수를 호출하면서 해결을 하였다.
또 하나는 PIT 에서 컨트롤러0 의 값을 가져올때 실수로 control port를 넣어야 할걸 counter port 를 넣게 되어 계속 리셋이 되는 버그가 있었다.
이는 control 포트로 고치면서 해결했다.
아무튼 여기까지 왔다.
이제 테스크, 멀티쓰래드, 동기화, 실수 연산으로 나아간다.
기대중임.